



06
December


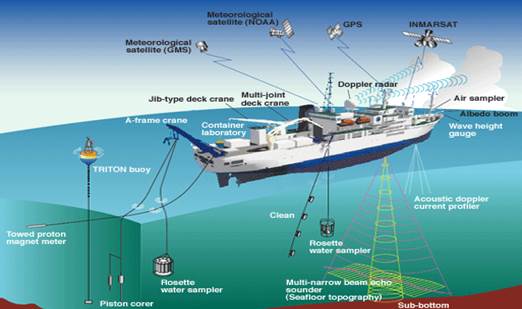
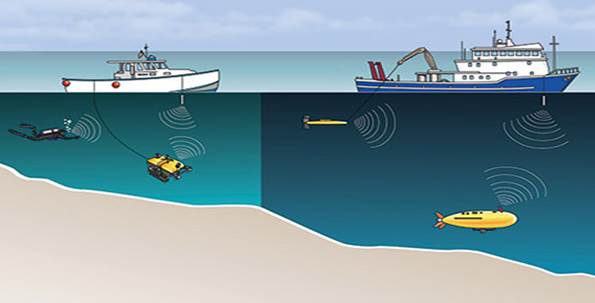
Dynamic positioning (DP) is a computer-controlled system to automatically maintain a vessel’s position and heading by using its own propellers and thrusters. Position reference sensors, combined with wind sensors, motion sensors and gyrocompasses, provide information to the computer pertaining to the vessel’s position and the magnitude and direction of environmental forces affecting its position. Examples of vessel types that employ DP include, but are not limited to, ships and semi-submersible mobile offshore drilling units (MODU), oceanographic research vessels, cable layer ships and cruise ships.
Application
Important applications include:
This is due to the fact that, by the nature of the work performed, these vessels must hold a given position most of the time (for example, supply vessels, drilling vessels and mobile drilling platforms, vessels, ensure diving operations and others) or perform movements from position to position with high accuracy ( cable laying vessels, pipelaying vessels, seismic survey vessels, dredgers and others).
Less often, the DP system can be found on tankers, cruise passenger liners and others.

Elements of the system:
The power supply system includes all components and systems necessary for supplying the DP system with energy, namely:
The DP control system includes all components and systems, hardware, software and software, necessary for the task of the dynamic position of the vessel, and:
Classes of DP Systems
DP systems are divided into three classes (according to the degree of reliability):
Class 1 (DP 1). The “loss” of a given position by a ship can occur in the event of any single malfunction.
Class 2 (DP 2). “Loss” of position does not occur in the event of a single failure of any subsystem or component (propulsion, sensor, control console, etc.), including cables, pipes, etc.
Class 3 (DP 3). The term “single fault” includes, in addition to the faults specified for Class DP-2, the complete failure of all components within one waterproof or fireproof compartment due to fire or flooding.

Dear seafarers, we are excited to introduce new opportunities for your career! Vessel Type: PCTC CEU: 7000 – 11000 A top global shipowner and operator managing one of the most advanced and extensive fleets in the industry is strategically expanding its presence in the PCTC segment With a reputation built on operational excellence and uncompromising safety standards […]

One of the newest vessels in the global merchant fleet – CMA CGM Notre Dame Delivered as part of the latest generation of ultra-large container ships, it represents the next step in maritime innovation – combining massive capacity with improved efficiency and sustainability. New generation. New standards. The future of shipping is being built right […]
For 13 years, the total tonnage of ships has doubled and this is not the limit. In 2006, the global merchant navy reached a billion dwt. To date, the deadweight of the world merchant fleet has passed the mark of two billion. And by 2033, three billion are predicted, but if the growth rate is […]

Спікери Ukrainian Transport Forum 2025 поділилися думками про те, що морська галузь в Україні втрачає конкурентоздатність, а приватні компанії змушені шукати розв’язання системних проблем самотужки. Проблеми галузі обговорили під час Ukrainian Transport Forum 2025, що проходив в Одесі в рамках колаборації АМЕУ, ЄБА та проєкту Maritime Days in Odesa. Зокрема учасники головного транспортного заходу року […]

The global port construction market is recovering from the recession, many projects are under development and implementation. As in many other industries, the global recession had a negative impact on the seaport construction market, the construction of new ports and terminals and the reconstruction of old ones were delayed or even canceled due to a […]
Sorry, this entry is only available in Ukrainian.

Dear Seafarers! We sincerely congratulate you on the upcoming Christmas and New Year! May your homes be warm and cozy, and your hearts be filled with joy and inspiration. We are grateful for your professionalism, dedication and trust in our company. We wish that the New Year 2025 will bring you new achievements, good health […]

The crew of the average merchant vessel of the year in commercial production in 1860 is about 250 people. In 1880 there were about 140 people. By 1900, when steamships forced out the sailboats, it finally fell to 100 people. The crew of the diesel commercial vessel in the middle of the 20th century is […]

Dear seafarers❗️ A petition appeared regarding the possibility of obtaining a seafarer’s passport abroad. The petition was filed by the USU organization today. Lin for signatures: https://petition.kmu.gov.ua/petitions/6082